5.3 CONTRÔLE ET RÉGULATION
![]()
INTRODUCTION |
Lorsque l’on travaille avec des machines, en particulier des robots, on est souvent confronté au problème de les contrôler de sorte qu’une variable mesurée soit aussi proche que possible d’une valeur prédéterminée, la valeur de consigne. C’est le cas dans une voiture équipée d’un tempomat responsable de maintenir la vitesse du véhicule aussi proche que possible d’une vitesse donnée, la valeur de consigne, indépendamment des facteurs extérieurs comme la pente de la route. À cette fin, un système de régulation doit être en mesure de déterminer la vitesse instantanée de la voiture (valeur réelle) à l’aide d’un capteur et d’ajuster ensuite la puissance du moteur de manière appropriée, comme si l’on agissait sur la pédale des gaz.
De nombreuses activités humaines peuvent être considérées comme des processus de régulation. Voici quelques exemples :
|
VOITURE AUTONOME |
Conduire une voiture est un processus de contrôle très complexe devant prendre en compte de nombreux signaux d’entrée qui affectent le conducteur non seulement visuellement, mais de manière haptique (forces ressenties par le corps). Le comportement du conducteur résulte du traitement mental de tous ces signaux (tourner le volant, actionner la pédale des gaz, etc …).
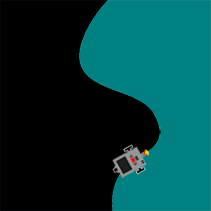
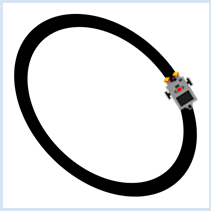
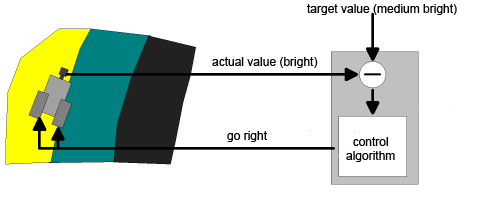
Schématiquement, on peut représenter ce processus par une boucle de régulation. Le capteur photosensible mesure l’intensité lumineuse (valeur mesurée) et la transmet au régulateur qui la compare à la valeur désirée (valeur de consigne) correspondant à la route verte. Le régulateur utilise la différence entre la valeur mesurée et la valeur de consigne pour déterminer par un algorithme de régulation spécifique à la situation la grandeur de contrôle à envoyer à l’essieu afin de ramener la valeur mesurée à la valeur de consigne.
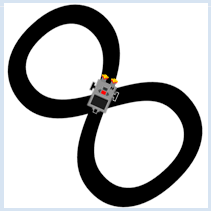
On voit que ce schéma constitue une boucle partant des capteurs du véhicule, passant par le système de régulation et revenant à nouveau vers les moteurs du véhicule qui vont à nouveau influencer les valeurs mesurées par les capteurs …
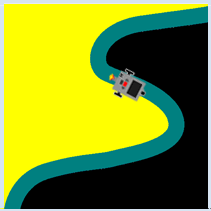
Ce programme utilise un algorithme de régulation trivial : si la valeur mesurée est plus grande que la valeur de consigne, le véhicule se trouve dans la zone jaune et doit tourner vers la droite. Si la valeur mesurée est par contre inférieure à la valeur de consigne, le véhicule se trouve dans la zone noire et doit effectuer un virage vers la gauche. Dans tous les autres cas, il se trouve dans la zone verte et peut continuer sa course en ligne droite.
|


MEMENTO |
|
La régulation fonctionne sans encombre en mode simulé, ce qui n’est pas le cas en mode réel. Ceci vient du fait que les valeurs mesurées par le capteur fluctuent dans la réalité, même lorsque le capteur se trouve sur une surface de couleur uniforme. Ces fluctuations sont dues, même sur une surface uniforme, aux différences d’éclairage et aux erreurs de mesures du capteur. Faites l’effort de chercher par vous-mêmes une solution à ce problème !
Le rayon de courbure transmis à leftArc() ou rightArc() est une paramètre sensible. Une petite valeur de ce paramètre conduit certes à de petits écarts avec la route mais à un comportement oscillatoire très nerveux [plus...Les oscillations du du régulateur constituent une imperfection typique des |
EXERCICES |
|